伺服驱动器与伺服电机:区别与工作原理的深度解析!
伺服驱动器和伺服电机是在自动控制系统中关键的组成部分,它们协同工作以实现高精度的位置控制和运动控制。虽然它们经常一起使用,但它们是两个不同的组件,各自具有独特的功能和工作原理。在本文中,我们将深入探讨伺服驱动器和伺服电机之间的区别,以及它们的工作原理。
伺服驱动器是什么?
伺服驱动器,也称为伺服控制器或伺服放大器,是用来控制伺服电机的设备。它的作用类似于变频器对普通交流电机的控制。伺服驱动器的主要任务是接受来自上位机或控制系统的命令,然后将这些命令转化为对伺服电机的控制信号,以控制电机的速度、位置和力矩。伺服驱动器通常是高精度定位系统的重要组成部分,它能够实现精确的传动系统定位。

伺服电机是什么?
伺服电机是一种用于执行机械运动的电机,通常在伺服系统中使用。伺服电机能够将电压信号转化为转矩和转速,以驱动控制对象实现精确的位置控制。它们的转子速度受输入信号的控制,具有快速的响应能力,通常用作自动控制系统中的执行元件。伺服电机可以根据控制系统的需求,将电信号转换成电机轴上的角位移或角速度输出。
伺服驱动器与伺服电机的区别
功能不同:伺服驱动器主要负责接收和解释来自控制系统的命令,并生成适当的控制信号,以控制伺服电机的运动。伺服电机则是实际执行运动的电机,根据伺服驱动器提供的控制信号来实现精确定位和控制。
位置关系:伺服驱动器通常位于控制系统的较高层次,接收命令并协调伺服电机的运动。伺服电机位于机械系统中,直接执行控制指令,根据驱动器的信号转动。
控制精度:伺服电机的控制精度通常更高,因为它们直接负责机械运动的实际执行。伺服驱动器则负责生成控制信号,其精度取决于驱动器本身的性能。
伺服驱动器和伺服电机的工作原理
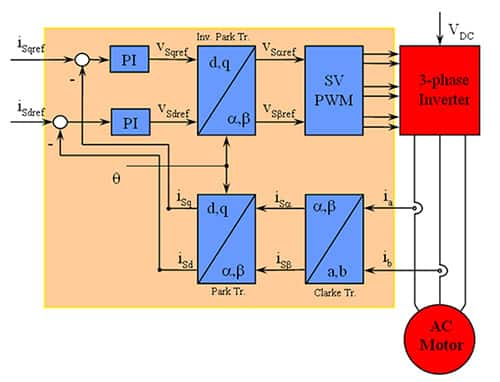
伺服驱动器的工作原理是通过接收来自控制系统的指令,将这些指令转化为控制信号,并传递给伺服电机。通常,伺服驱动器采用数字信号处理器(DSP)作为控制核心,具有复杂的控制算法,以实现数字化、网络化和智能化控制。驱动器内部的功率器件使用智能功率模块(IPM),它集成了驱动电路和各种保护电路,以确保驱动器的稳定运行。伺服驱动器还包括位置、速度和力矩控制回路,以实现精确的运动控制。
伺服电机的工作原理涉及将电信号转化为机械运动。伺服电机内部通常包含永磁铁转子,通过电机控制器生成的电磁场控制转子的旋转。同时,伺服电机配备编码器来反馈电机的实际位置,控制器可以根据编码器的信号与目标位置进行比较,并调整输出信号以实现精确的位置控制。伺服电机通常分为直流伺服电机和交流伺服电机,具有高精度、快速响应、低惯量和高线性度等特点。
总之,伺服驱动器和伺服电机在自动控制系统中起着不可或缺的作用,它们共同协作以实现高精度的位置和运动控制。伺服驱动器负责生成控制信号,而伺服电机执行实际的运动任务,两者紧密合作,确保系统的稳定性和性能。了解它们之间的区别和工作原理对于有效地设计和维护伺服控制系统至关重要。